Una vez completada la fase anterior, ha llegado el momento de dotar a nuestro robot de algún tipo de sistema para evitar obstáculos. En el caso de LEGO, lo que se nos ofrece es un sensor de distancias vía ultrasonidos; el mismo, ubicado como cabeza, evitará que nuestro amigo Alphie se lleve las cosas por delante. Aquí les dejo alguna fotos del dispositivo ya colocado.

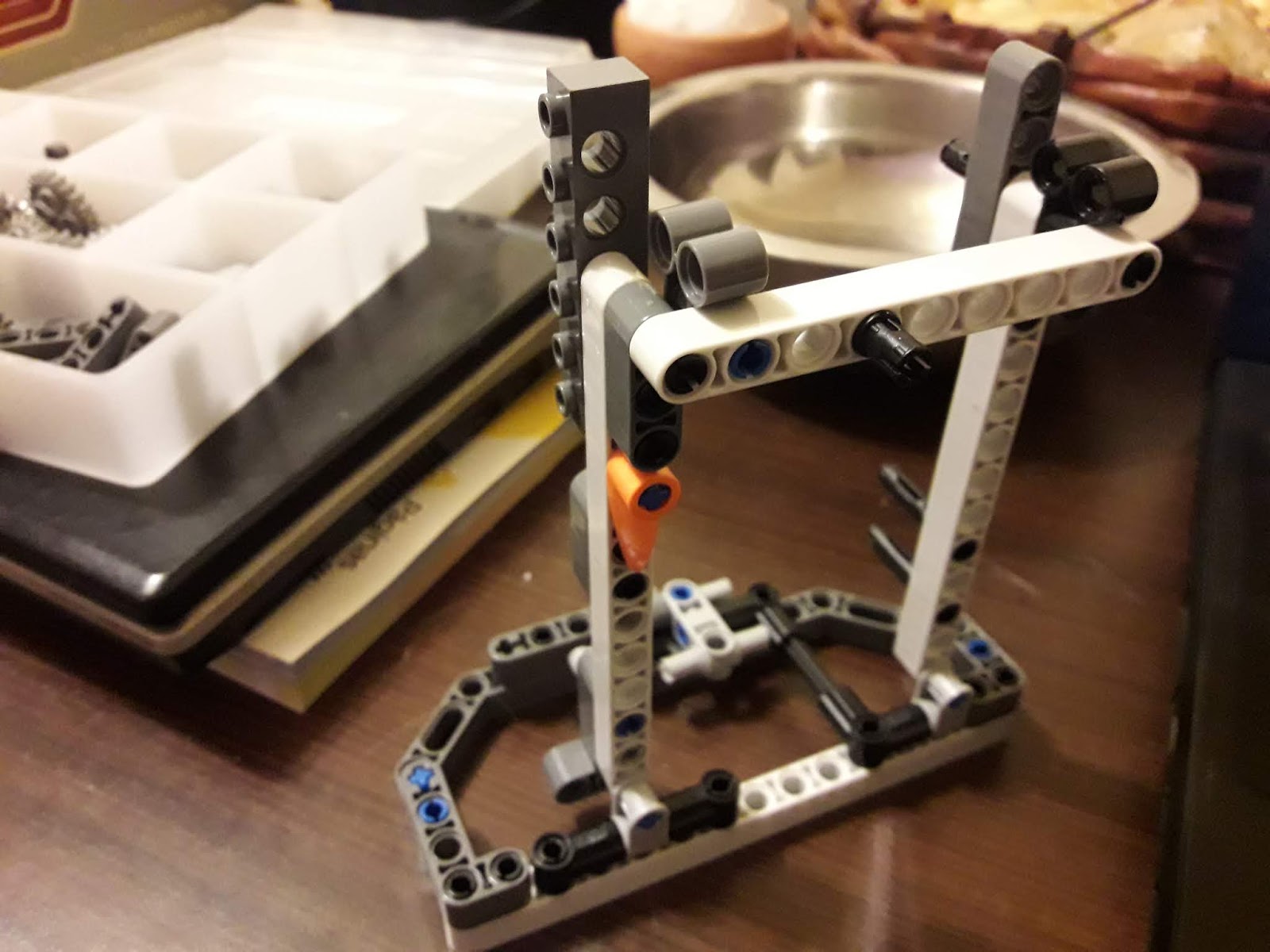
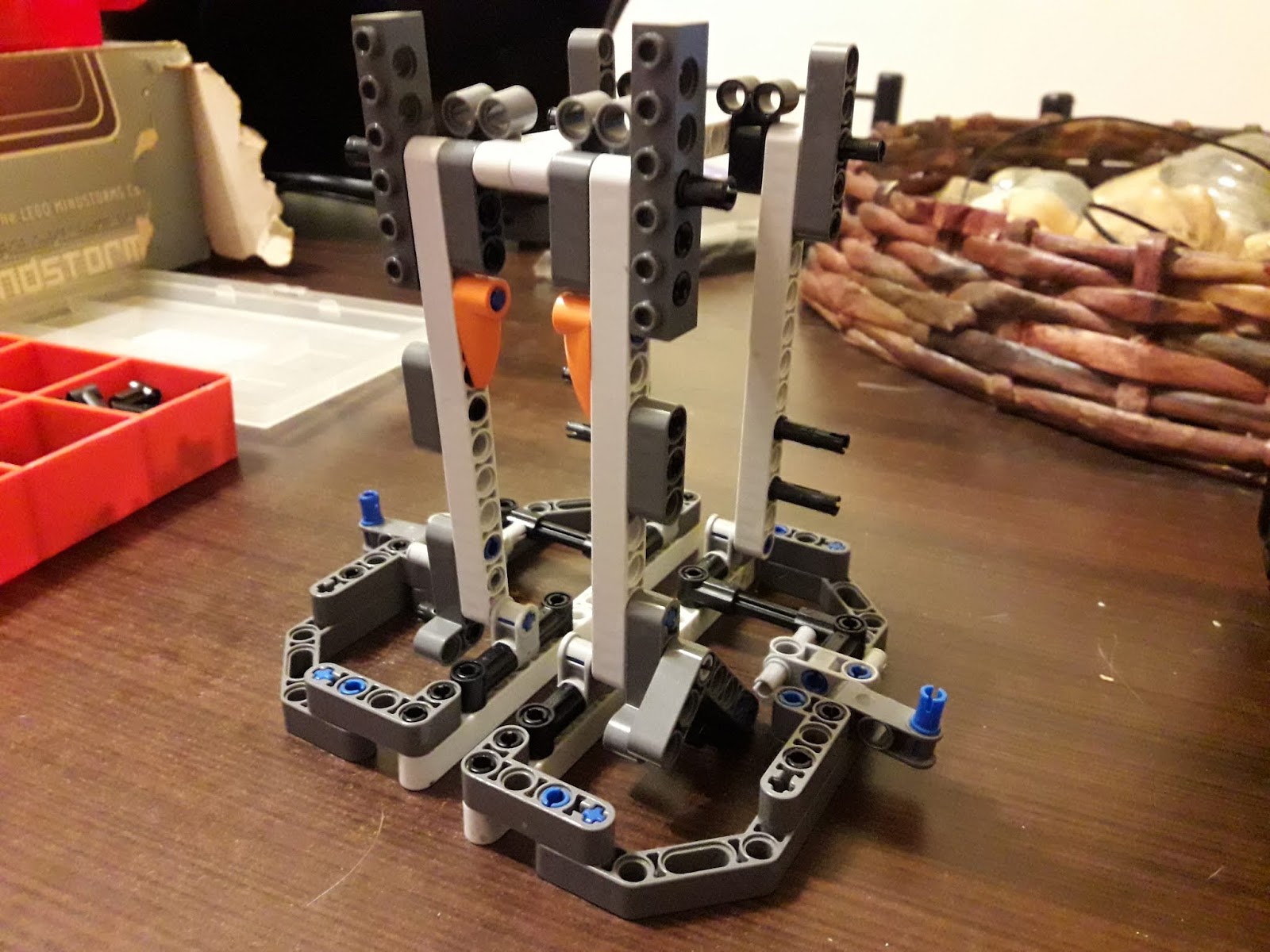
Sensor ultrasónico y soporte cervical izquierdo.


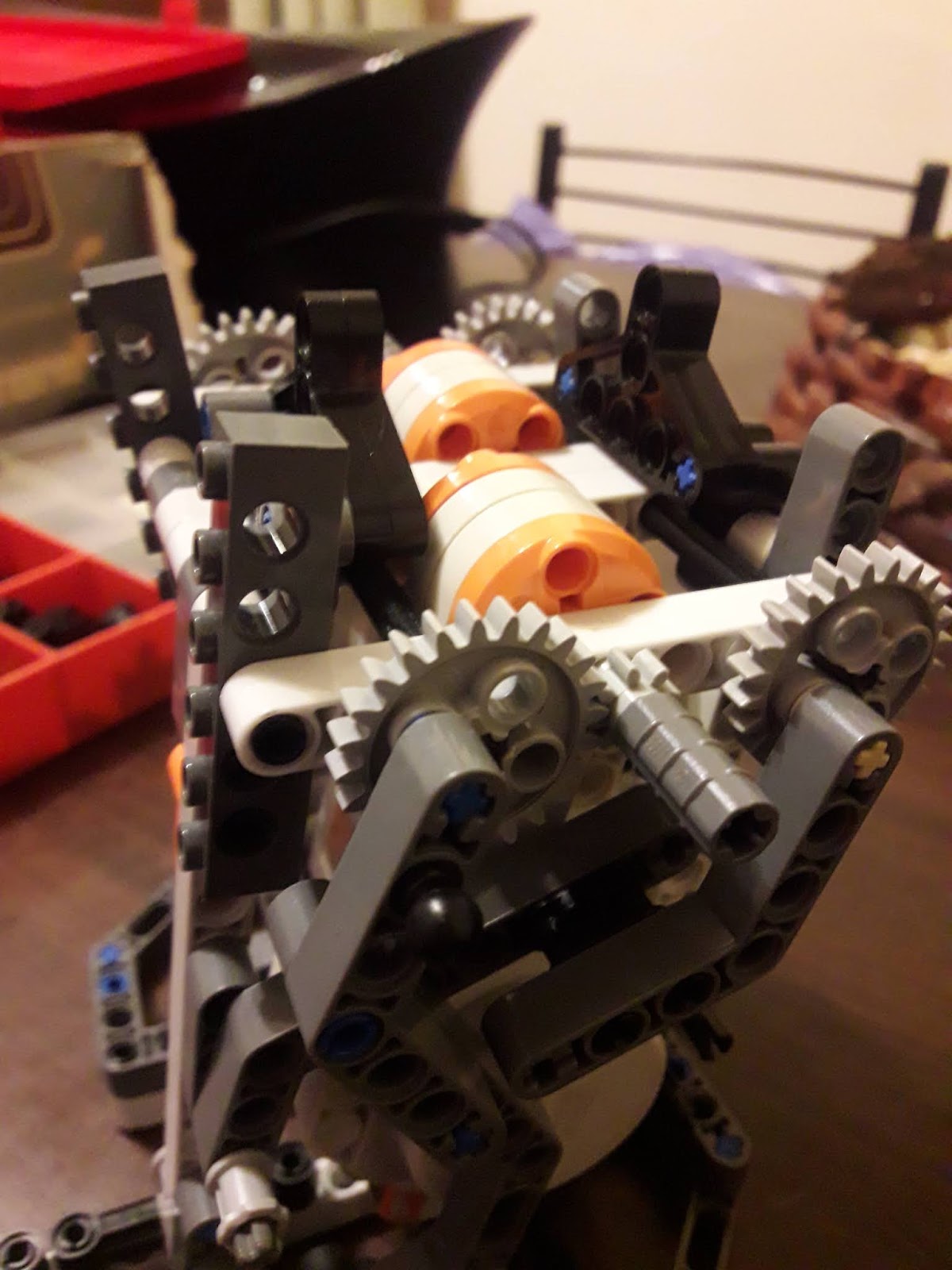
Sensor ya colocado.



Conexión al puerto 4.